Kudan AR SDK

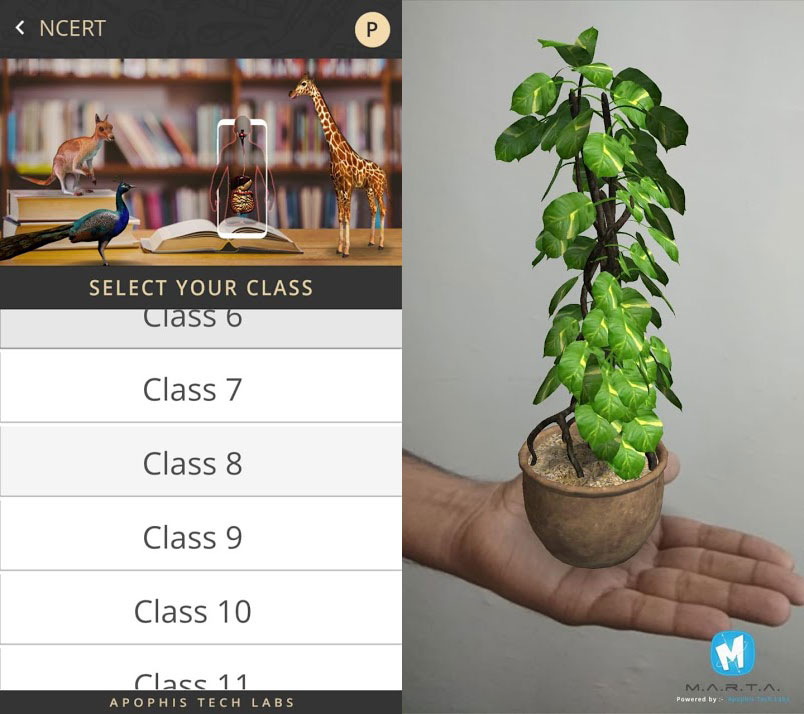
Kudan AR SDK は、モバイル アプリケーション開発向けに、世界中のプロフェッショナルから利用されているマーカー AR およびマーカーレス AR の両方に対応した SDK(ソフトウェア開発キット) です。
高速で、データサイズ、フットプリントが小さく、iOS (アイフォン) や Android (アンドロイド) デバイスに対応し、さらに Unity プラグインを提供しています。ハードウェアに依存しないアルゴリズムで、最新のモバイル デバイスを必要としません。
Kudan は、AR SDK から OS のレンダリング機能を取り除き、トラッキング機能に特化した CV SDK も提供しています。


![First slide [1140x500]](images/img_about_slide01.jpg)
![Second slide [1140x500]](images/img_about_slide02.jpg)
![Third slide [1140x500]](images/img_about_slide03.jpg)
![Third slide [1140x500]](images/img_about_slide04.jpg)
