|
KudanAR - iOS
|
|
KudanAR - iOS
|
#import <ARGyroPlaceManager.h>
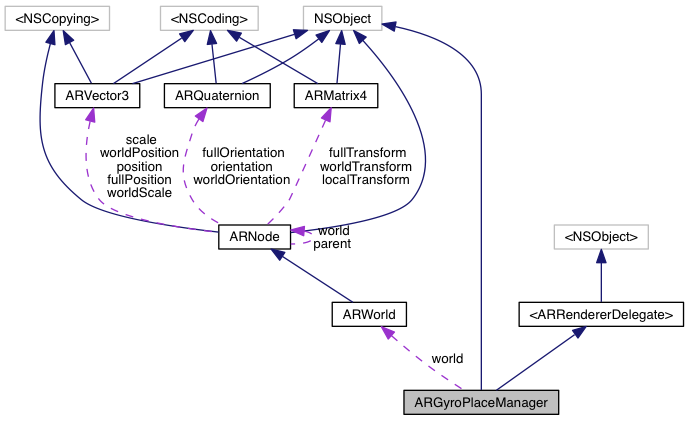
 Inheritance diagram for ARGyroPlaceManager: Collaboration diagram for ARGyroPlaceManager:
Inheritance diagram for ARGyroPlaceManager: Collaboration diagram for ARGyroPlaceManager:Instance Methods | |
| (void) | - initialise |
| (void) | - deinitialise |
| Instance Methods inherited from <ARRendererDelegate> | |
| (void) | - rendererPreRender |
| (void) | - rendererPostRender |
| (void) | - rendererDidPause |
| (void) | - rendererDidResume |
Class Methods | |
| (ARGyroPlaceManager *) | + getInstance |
Properties | |
| float | floorDepth |
| ARWorld * | world |
| CGPoint | screenCentre |
Gyro place is a sensor-only tracker that places content on a virtual floor plane where the device is aimed.
| - (void) deinitialise |
Deinitialise the Gyro Place Manager.
Example of use:
| + (ARGyroPlaceManager *) getInstance |
Get the Gyro Place Manager singleton.
Example of use:
| - (void) initialise |
Initialise the Gyro Place Manager. Sometimes, while the manager first initialises, the device's gyroscope will report incorrect values, causing the orientation of the target node to appear incorrect. This will correct itself after a number of frames.
Example of use:
|
readwritenonatomicassign |
The distance between the floor and the camera. The units are arbitrary but can have real-world meaning to achieve realistic scale for placed content. Eg. if you estimate the device to be 100cm above the floor, set floorDepth to -100. Content rendered using this same space will look approximately the correct scale. The default value is -150;
|
readwritenonatomicassign |
The centre of the screen in viewport coordinates. This is automatically set but can be overridden if you with a different part of the screen to act as the target.
|
readwritenonatomicassign |
The world node that is controlled by this tracker. The world is placed where the camera normal intersects the floor plane.
 1.8.11
1.8.11