|
KudanAR - iOS
|
|
KudanAR - iOS
|
#import <ARGyroManager.h>
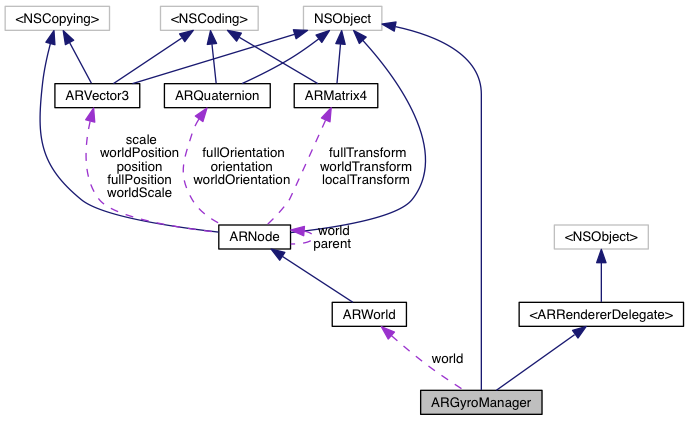
 Inheritance diagram for ARGyroManager: Collaboration diagram for ARGyroManager:
Inheritance diagram for ARGyroManager: Collaboration diagram for ARGyroManager:Instance Methods | |
| (void) | - initialise |
| (void) | - deinitialise |
| (void) | - start |
| (void) | - stop |
| (void) | - actualStart |
| (void) | - actualStop |
| (void) | - updateNode |
| (void) | - addDelegate: |
| (void) | - removeDelegate: |
| Instance Methods inherited from <ARRendererDelegate> | |
| (void) | - rendererPreRender |
| (void) | - rendererPostRender |
| (void) | - rendererDidPause |
| (void) | - rendererDidResume |
Class Methods | |
| (ARGyroManager *) | + getInstance |
Properties | |
| ARGyroManagerState | gyroState |
| ARGyroManagerStateInternal | internalGyroState |
| CMMotionManager * | motionManager |
| CMAttitudeReferenceFrame | gyroReferenceFrame |
| ARWorld * | world |
A manager class representing the device's gyro. This class is resposible for using IMU data to transform AR content with device rotations.
| - (enum) ARGyroManagerState |
| - (enum) ARGyroManagerStateInternal |
Enum representing the gyro managers internal state.
| - (void) addDelegate: | (id< ARGyroManagerDelegate >) | delegate |
Add a delegate for gyro event notifications.
| delegate | The delegate to add to the Gyro Manager. |
| - (void) deinitialise |
Deinitialises the ARGyroManager singleton and dereferences CMMotiionManger.
| + (ARGyroManager *) getInstance |
| - (void) initialise |
Initialises the ARGyroManager singleton and the CMMotionManger with a default gyro update interval of 0.05 seconds.
| - (void) removeDelegate: | (id< ARGyroManagerDelegate >) | delegate |
Remove a delegate for gyro event notifications.
| delegate | The delegate to remove from the Gyro Manager. |
| - (void) start |
Starts device motion updates and adds ARGyroManager to the list of ARRenderDelegates.
| - (void) stop |
Stops device motion updates and removes ARGyroManager from the list of ARRenderDelegates.
| - (void) updateNode |
Updates the world orientation.
|
readwritenonatomicassign |
The reference frame used to start the motion manager. Default is CMAttitudeReferenceFrameXTrueNorthZVertical.
|
readwritenonatomicassign |
The gyro manager's current state.
|
readwritenonatomicassign |
The gyro managers current internal state
|
readnonatomicassign |
The motion manager used to update the ARGyroManager's orientation.
|
readwritenonatomicassign |
A node representing the ARGyroManager's world.
 1.8.11
1.8.11