Kudan について
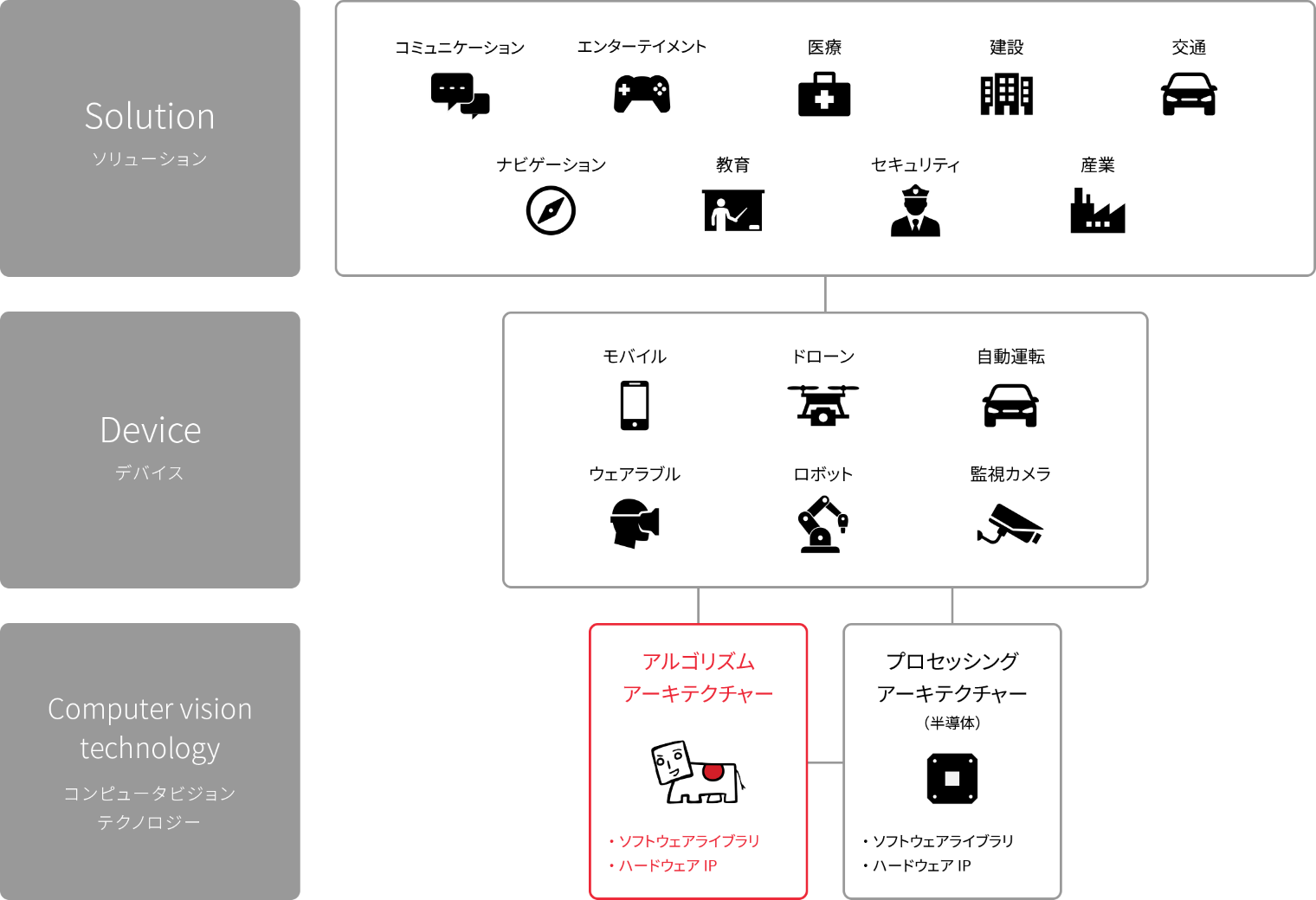
Kudan は、コンピューターに「眼」の機能を持たせるコンピューター ビジョンの研究開発を進め、ソフトウェア ライブラリおよびハードウェア IP コアを提供します。空間・立体認識技術「SLAM (Simultaneous Localization
and Mapping)」を独自に研究開発した結果生まれた「KudanSLAM (スラム)」は、高速かつ低負荷で、カメラ画像 (入力) からデバイスの自己位置認識と周囲の地図を作成できます。
また、実用性と汎用性を強みに、他のデバイス、カメラ、センサー等と組合せることもできます。 現実世界をリアルタイムに 3 次元の情報としてとらえることで、AR / VR / MR、自動運転、ドローン、ロボティックス、半導体チップへの組込みなど、カメラを搭載可能なあらゆるデバイスでご活用いただけます。
今後、Kudan はコンピューター ビジョンのリーディング カンパニーとして、次世代のあらゆるビジョン デバイスでの活用を目指します。
KudanSLAM の紹介
多様性
ハードウェアやオペレーティング システム (OS) に依存しません:
コアとなるコードベースは、ほとんどのプロセッサー アーキテクチャをターゲットとし、OS の機能に依存することはありません。低消費電力の一般的な使用から高度なカスタム DSP まで、複数のプロセッサー クラスを利用できます。単眼およびステレオ
(複眼) カメラから視覚慣性深度カメラまで、多種多様なハードウェア センサーをサポートしています。
特定の用途をターゲットとしていません:
Kudan の SLAM は、できるだけ汎用的な用途向けにデザインされています。モバイルの位置情報のトラッキングから自動運転にいたるまで、あらゆる状況で同等に使用できます。
完全に構成可能で簡単に統合できます:
システムは、あらゆる面において高度に構成可能で、シンプルで使いやすい API を介して公開でき、ターゲットのハードウェアと用途を容易に統合できます。
モジュール性
高度な SLAM:
ループ検出やクロージャ、リローカリゼーションおよびバンドルの調節といったモジュールなど、トラッキングおよびマッピングに対する異なるアプローチを利用できます。
中間レベルのコンピューター ビジョン:
さまざまなポイント マッチング メカニズム、ステレオ マッチャー、およびポーズ推定の効率的な実装ができます。パブリック ドメインでは利用できないより良いアルゴリズムを活用し、すべて高度に構成可能で最適化されています。
低レベルの画像処理と数値演算:
さまざまなぼやけ、補間、および画像ワープなど、一般的な視覚処理のビルディング ブロックを高度に最適化したバージョンを提供します。これらは通常 SIMD (Single Instruction/Multiple Data) に最適化されており、OpenCV
に比べてはるかに優れたパフォーマンスを提供します。また、独自の線形代数ライブラリも提供しています。
お役立ちモジュール:
Kudan では SLAM 技術自体にフォーカスする一方で、統合に役立つさまざまなモジュールを提供しています。生成した SLAM マップで動作するモジュールも含め、クロスプラットフォームのコンピューター ビジョンのデバッグ向けにデザインされた
GUI ライブラリを提供しています。