
今回の記事は、PhotoModeler の基本的な操作方法、というシリーズの趣旨からはいくぶん外れますが、フォトグラメトリ プロジェクトを作成する上で非常に重要な「正確度」に関する概念についてお伝えします。
PhotoModeler は「写真からの測定」と定義されるフォトグラメトリのサイエンスに基づいています。 フォトグラメトリ プロジェクトの正確度を左右する要因は多数存在します。ここでもっとも重要な概念は、プロジェクトの実行方法を変更することにより、プロジェクトの正確度を変更することが可能である、ということです。ここでは、「相対確度」と「精度」について説明します。相対確度と絶対確度、ならびに精度の区別については、こちらの記事 (英文) をご参照ください。
ここに記載されている要因は、あらゆる種類のフォトグラメトリ プロジェクト (手動マーキング、コード ターゲット、SmartMatch、UAV/ドローンなど) に影響しますが、これらの要因が正確度にどのように影響するかは、プロジェクトの種類によります。たとえば、SmartMatch プロジェクトや UAV プロジェクトの自動化機能では、通常の写真間の低角度に対し、より多くの写真を撮影することができます(「写真の重複」要因)。したがって、SmartMatch プロジェクトや UAV プロジェクトについては、あまり低角度を懸念する必要はありません。
おもな要因は次のとおりです。
- 写真の解像度
- カメラのキャリブレーション
- 角度
- オリエンテーションのクオリティ
- 写真の重複
- ターゲット/マーキングの精度
写真の解像度: 画像におけるピクセル数を指します。画像の解像度が高いほど、対象のオブジェクトをより正確にとらえられますので、高精度が実現できる可能性が高くなります。
カメラのキャリブレーション (較正): キャリブレーションは、カメラの焦点距離、フォーマットのサイズ、主点、およびレンズの歪みを見極めるプロセスです。これらの情報を収集する方法はいくつかありますが、PhotoModeler ではキャリブレーション済みのカメラを使用することで、より良い結果が期待できます。この要因については、さらに細分化されるふたつの要因があります。1 つは、(広角レンズや魚眼レンズなど) うまくキャリブレーションできないカメラもあるという点、もう 1 つはキャリブレーションによる変更が不安定なカメラもある、という点です。どちらの場合も、正確度は低くなってしまいます。逆に、安定したカメラで高品質のレンズを使用することにより、正確度は上がります。
角度:ポイントやオブジェクトが極めて狭い角度の写真のみでしかキャプチャされていない場合 (たとえばポイントが低角度の 2 枚の写真にしかキャプチャされていない場合) は、90 度に近い角度で撮影された写真にキャプチャされたオブジェクトに比べ、正確度はかなり低下します。カメラの位置に広がりを持たせることにより、最善の結果が得られます。SmartMatch 機能や UAV を使ったプロジェクトでは、写真間の角度が低くても、複数の写真における総角度がポイントの正確度に影響しますので、問題ありません。
オリエンテーションのクオリティ: PhotoModeler は、プロジェクトの処理中、各写真におけるカメラの位置と角度を算出しますが、これをオリエンテーションと呼びます。プロジェクトの正確度に大いに影響する要因の 1 つとして、カメラの位置ごとに正確なオリエンテーションを得ることが挙げられます。うまく配置されたポイントが多ければ多いほど、また写真中でポイントがカバーする範囲が広ければ広いほど、オリエンテーションのクオリティも向上します。
写真の重複: 通常、ポイントまたはオブジェクトの位置は、最低ラインである 2 枚の写真ではなく、より多くの写真にキャプチャされているほど正確に算出されます。マーキングの精度については、複数の写真を使用することによりエラーが「平均化」されますので、最終的な出力確度は向上します。
ターゲット/マーキングの精度: 3D ポイントの正確度は、画像内でのポイントの位置の精度に直結しています。ターゲットを使用することにより、画像内でのポイントの位置をより正確に特定できます。PhotoModeler は、画像のデータを使ってポイントをサブピクセル単位でマーキングし、それによって位置の精度が上がるため、結果として算出される3D でのポイント ロケーションの全体的な正確度も向上します。
以下の表では、これらの要因のさまざまな組み合わせがプロジェクトの正確度にどのように影響するかを確認できます。
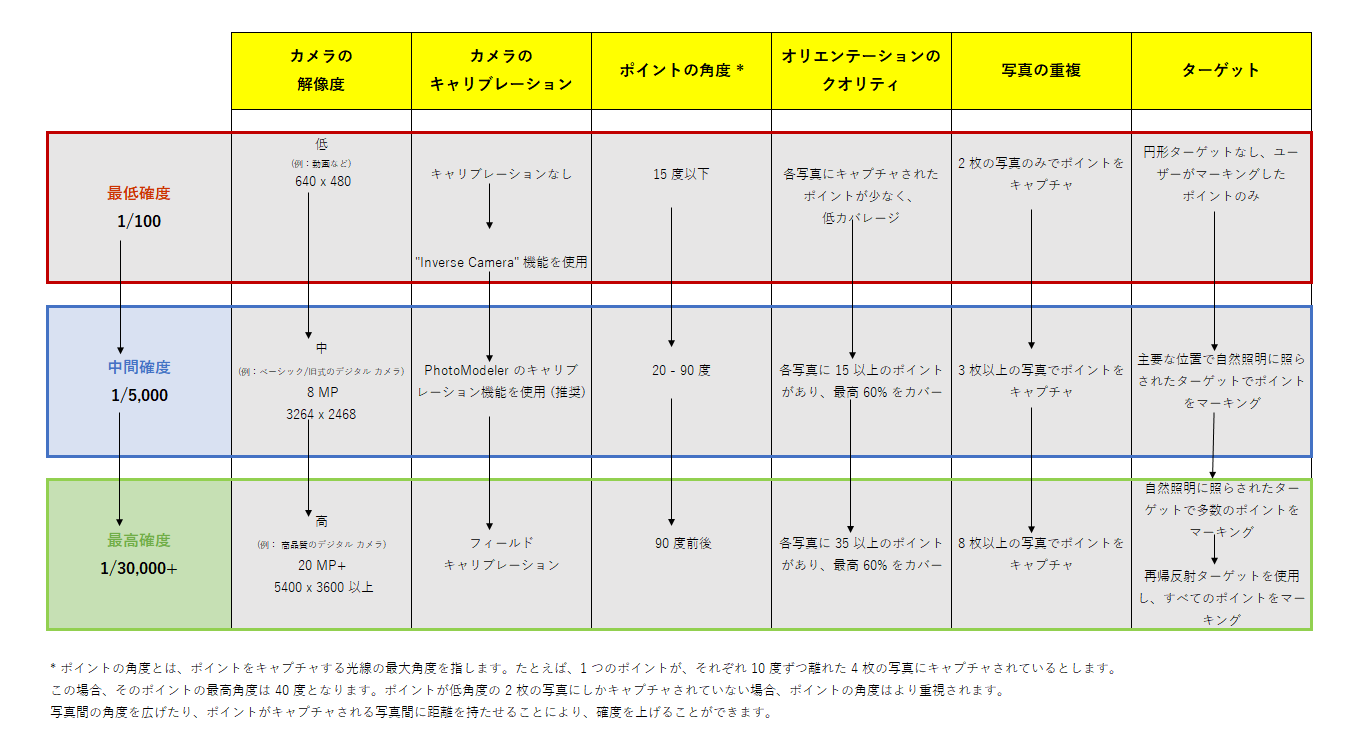
フォトグラメトリの正確度スケール (画像をクリックすると拡大されます)
他の項目が一定であれば、各カラムを下に移動するごとに正確度が上がります。
たとえば、低解像度でキャリブレーションされていないカメラを使用し、写真間の角度が狭く、各写真のカバレージは低く、2 枚の写真にしかマーキングがなく、サブピクセル ターゲットがない場合、PhotoModeler で得られる確度は最低となります。
逆に、高解像度のフィールド キャリブレーションされたカメラを使って撮影した写真間の角度が 90 度に近く、適度なカバレージで 6 枚以上の写真にポイントが表示され、またポイントにターゲットを使用している場合、最高確度が期待できます。
上記の表における「1/NNN」の数値の正確度は、1σ の標準偏差となっています。3 メートルのオブジェクトで1/30,000 の確度である場合、ポイントの位置は 68% の確率 (1σ) で0.1 ミリメートルの確度であるといえます。これが相対確度です。絶対確度を得るには、プロジェクトをスケールするか、コントロール ポイントを定義する必要があります。これらのスケールやコントロール ポイントの正確度は、絶対確度に影響します。スケールやコントロール データの確度 (標準値または真値との完全一致) が高いほど、絶対確度も高くなります (相対確度が一定である場合)。適切な相対確度なしで絶対確度を得ることは困難なため、まずは上記で説明した各要因を考察することを推奨します。
ポイントの正確度 vs. プロジェクト全体の正確度
最後になりますが、上に挙げた要因は、個々のポイントの正確度と、プロジェクトの全体的な正確度の両方に適用されます。非常に確度の高いプロジェクト (解像度が高く、うまくキャリブレーションされたカメラでポイントの角度や写真の重複は平均して理想的) であっても、その中の 1 つのポイントに関しては、重複性がなく、低角度であるために、正確度が低い、ということも考えられます。上記の要因をすべてクリアしたクオリティの高いプロジェクトにおいても、プロジェクト内の各ポイントが同様に条件を満たしているかに注視する必要があります。これは、プロジェクトの中でも主要なポイントや、スケールの定義や位置の制御に使用されるポイントにおいて特に重要な点です。
PhotoModeler の製品概要、価格、およびライセンス体系などについては、こちらを参照してください。
30 日間の評価版ライセンスをご希望の方は、お気軽にお問い合わせください。
記事参照:
©Copyright 2018 PhotoModeler Technologies
「Factors Affecting Accuracy in Photogrammetry」

