
写真データをもとに 3D モデリングや高確度の測定を行うフォトグラメトリ ツール、 PhotoModeler のプロジェクトでは、「リファレンシング」という作業が発生します。
リファレンシングとは、2 つ以上の異なる画像上のマーキングが、空間における同じオブジェクトを指していることを PhotoModeler 上で示すプロセスのことです。
ポイント (Point Mark) やエッジ (Edge Mark)、カーブ (Curve Mark)、シリンダー (Cylinder Mark)、シルエット (Silhouette Mark) などの写真のマーキング (ユーザーが写真上で特定した位置) は、オブジェクトが表示される各画像でマーキングおよびリファレンシングする必要があります。
単一の写真を使ったプロジェクトでは、リファレンシングは使用されません。
複数の写真を使ったポイント プロジェクトでは、リファレンシングは、プロジェクトを正しく処理し、オブジェクトの 3D 位置を算出するために必要な、非常に重要なステップです。複数の写真を使ったシェイプ プロジェクトでは、リファレンシングによって詳細を追加し、マーキング可能なシェイプ上で交点として識別できないポイントを定義することができます。
リファレンシングは、最低でも 2 枚の写真上で行う必要がありますが、プロジェクトで使用するすべての写真上でも可能です。
以下の図に示す例では、写真 1 に表示される端点が、写真 2、写真 3 で表示される端点と同一であることを PhotoModeler で示す必要があります。
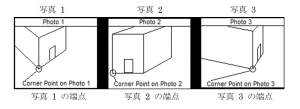
同一のポイントを 3 つのビューでリファレンシングする
ポイントをリファレンシングするには、以下の 3 つの異なる方法があります。
1) まずすべてのポイントをマーキングし、次のステップでそれらをリファレンシングする方法
2) マーキングとリファレンシングのステップを組み合わせる方法
1 枚の写真を選択し、その写真上に見られるすべてのポイントをマーキングします。次に、1 枚目の写真と共通のポイントを多く持つ 2 枚目の写真を選択します。1 枚目の写真を「参照元」(“Reference Source”) とし、すべてのマーキングされたポイントを選択します。1 枚目の写真でハイライトされているとおりに、2 枚目の写真でもポイントをマーキングします。この方法は、マーキングとリファレンシングを別に行う方法よりは難易度が高くなる場合がありますが、より効率的な方法でもあります。
3) リファレンス (“Reference”) モードで単一のポイントのマーキングとリファレンシングを行う方法
リファレンス (“Reference”) モードで画像をクリックして新しくマーキングし、その写真を参照元として直後に別の写真上での同一ポイントをマーキングします。参照元の写真でシフト キーを押したまま複数のポイントをマーキングし、別の写真でそれら複数のポイントをまとめてリファレンシングすることもできます。
エッジやカーブ、シリンダー、シルエットなどは、リファレンシングの前にマーキングする必要がありますので、1) の方法を適用します。1) の方法は、リファレンス モードまたはクリック リファレンサー (“Quick Referencer”)で実行可能です。
注: マーキングは、写真上のみで描画されるオブジェクトです。複数のマーキングをまとめてリファレンシングすることにより、3D オブジェクトを形成できます。したがって、3D ポイントはマーキングされた 2 つ以上のポイントから、3D カーブはマーキングされた 2 つ以上のカーブから、3D シリンダーは、マーキングされた 2 つ以上のシリンダーから、3D エッジはマーキングされた 2 つ以上のエッジから、3D シルエットはマーキングされた 2 つ以上のシルエットから作成されます。
関連資料として、YouTube の PhotoModeler 専用日本語チャンネル では、「手動マーキングを使ったプロジェクト」を公開しています。ぜひこちらもご参照ください。
PhotoModeler は、写真をもとに高確度の測定を行い、3D データを作成できる、フォトグラメトリの主要なツールです。
PhotoModeler の特長、使用手順、またその原理などの製品概要については、こちらをご参照ください。
30 日間の評価版ライセンスをご希望の方は、お気軽にお問い合わせください。
©Copyright 2019 PhotoModeler Technologies
「Referencing Points」