フォトグラメトリ (写真測量) とは、写真を使って実世界のオブジェクトや現場を計測し、モデリングする技術のことです。フォトグラメトリ技術では、既知の情報を利用して未知の情報を得ることが可能となります。既知の情報の中でも重要なのは、写真の撮影に使用するカメラと、カメラのパラメーターを数学的に定義することです。
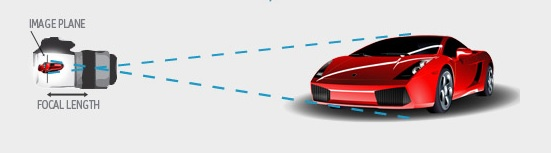
フォトグラメトリでは、光線を数学的にとらえ、撮影シーン、被写体、および撮影時のカメラの位置などの情報を幾何学的に構築します。光が被写体に当たると、カメラに反射してレンズを通過し、カメラのイメージ センサーもしくはフィルムにキャプチャされます。
カメラの基本的なパラメーター情報をもとに、フォトグラメトリ ソフトウェアがカメラと現場の関係を正確に、幾何学的に再現します。ソフトウェアの機能に必要なカメラの主要パラメーターは、焦点距離、撮像サイズ、サンプリング特性 (ソースがデジタル画像の場合)、主点、およびレンズの歪みです。これらはすべて、フィルムやイメージ センサーに取り込まれた光線が実世界の空間の一点でどのように生成されたかを理解するのに役立ちます。フォトグラメトリ ソフトウェアは、複数の光線からの情報を利用して撮影シーンを 3D で再構築します。
フォトグラメトリ ソフトウェアの使用によって、これらの内部特性を (キャリブレーション手順によって) 事前に把握するか、または (自動キャリブレーション/フィールド キャリブレーションによって) 撮影シーンの処理中に明らかにすることができます。フォトグラメトリ用のソース画像は、iPhone その他のスマートフォン、オートフォーカス カメラ、デジタル一眼レフ、監視カメラなど、多様なデバイスから入手可能です。主要なカメラの特性は以下のとおりです。
- 焦点距離 レンズの焦点距離により、光線の倍率や角度が決定されます。焦点距離が長ければ長いほど、画像の倍率が上がるため、遠距離から撮影をする場合には望遠レンズが使用されます。焦点距離が長いと、光線が画像センサーにあたる角度も浅くなります。短焦点レンズは視野内の広い領域をカバーし、その領域が非常に広い場合には広角レンズ、または魚眼レンズと呼ばれます。
- 撮像サイズ 光線と写真上の特定の点における幾何学的関係は、フィルムのサイズ、またはデジタル センサーの撮像領域によって左右されます。焦点距離を一定に保ちながら、撮像領域のサイズを大きくすると、画像内のシーンをより広くキャプチャできます。1 つの画像でキャプチャできる撮影シーンの広さは、焦点距離と撮像サイズの両方によって決定します。この (焦点距離と画像フォーマットサイズの) 関係または比率は、パラメーターのいずれか 1 つを知るよりも重要です。フィルム カメラの時代、画像サイズは通常 35mm で、時としては 8mm、16mm、70mm など別のサイズでした。今日のデジタル画像センサーは、携帯電話のカメラでは数ミリメートル、非常にハイエンドのセンサーでは 50mm と大きな開きがあります。
- サンプリング 最新のフォトグラメトリは、コンピューターを使ってデジタル領域で行われます。そのため、デジタル センサーでピクセルが撮像領域をカバーする、デジタル カメラを使用します。各ピクセルが、撮影シーンの一部から少量の光を拾い上げます。フォトグラメトリ ソフトウェアは、光線がセンサーの表面にあたる場所を利用して光線の幾何学形状を見極めます。デジタル画像からこの 2D ポジションを取得するには、デジタル画像内のピクセルと物理的なセンサー サイズとの関係が必要となりますが、サンプリングまたはピクセル サイズによって得られます。カメラによっては、ピクセルのサイズはわずか数ミクロンしかなく、これは人間の毛髪で考えると直径の数分の 1 に値します。
- 主点 写真は、3D の世界を 2D の画像で表します。レンズを介して 3D のシーンを像平面に投影することにより、シーンが 2D として表現されます。像平面とは、フィルムまたはデジタルイメージ センサーが位置する領域のことを指します。画像の主点とは、(光軸と呼ばれる) カメラの直接視線が像平面と交差する点を指します。これが、数学的な観点から見た画像の中心となります。高精度の写真測量作業では、(製造上の差異に起因して) レンズがイメージ センサーの中央に取り付けられているか、つまり主点が画像の中心にあるかどうかを知ることが重要になります。主点が画像の中心にあるか否かが、光線の幾何学形状の数学的計算に影響します。
- レンズの歪み 理想的なカメラでは (レンズを1つのピースとしてシミュレーションを行う場合)、光線は撮影シーンからカメラの撮像面まで直線状に移動します。ところが、実際のレンズは理想とは異なり、光線には興味深い歪みが生じます。この反り方は、像平面上の光線の位置によって異なります。一般的に見られるレンズの歪みに、樽型歪曲があります。この歪曲により、実際のシーンでの直線が曲線となって表れます。フォトグラメトリ ソフトウェアには、レンズの歪みを元に戻し、正しい内部形態を構築する機能があります。レンズの歪みから正確な結果を得るには、数式、またはマップによって特徴付ける必要があります。

[樽型歪曲]
これらの特性またはパラメーターはすべて、フォトグラメトリ ソフトウェアが正確な測量またはモデリングを行うために必要な、重要な幾何学的関係を定義するのに役立ちます。フォトグラメトリにおいて正確な結果を必要とする場合、カメラのパラメーターを正確に把握しておくことは必須です。また、これらのパラメーターが安定しているか、あるいは経時的に温度変化などの異なる動作環境によって変更する可能性があるのかを判断することも大切です。(プロジェクト処理の事前に、またはその一部として) カメラのキャリブレーションを行うことにより、これらの重要なパラメーターを決定するのに役立ちます。
汎用的なお手持ちのカメラで撮影した写真から 3D 測定値や 3D モデルを抽出できる、PhotoModeler 製品に関する詳細は、こちらをご参照ください。
